
Riva del Garda, ITALY 3 - 7 JUNE 2018



ISPRS Technical Commission II "Photogrammetry" focuses, at various scales, on geometric, radiometric and multi-temporal aspects of image- and range-based 3D surveying and modeling. Specifically Commission II deals with image orientation, point cloud generation and processing, 3D feature extraction, scene understanding, sensor and data fusion, sensor characterization, machine learning for geospatial data analysis and big data techniques for massive data processing. Applications in the fields of mapping, industry, heritage, space, underwater and environment are considered.
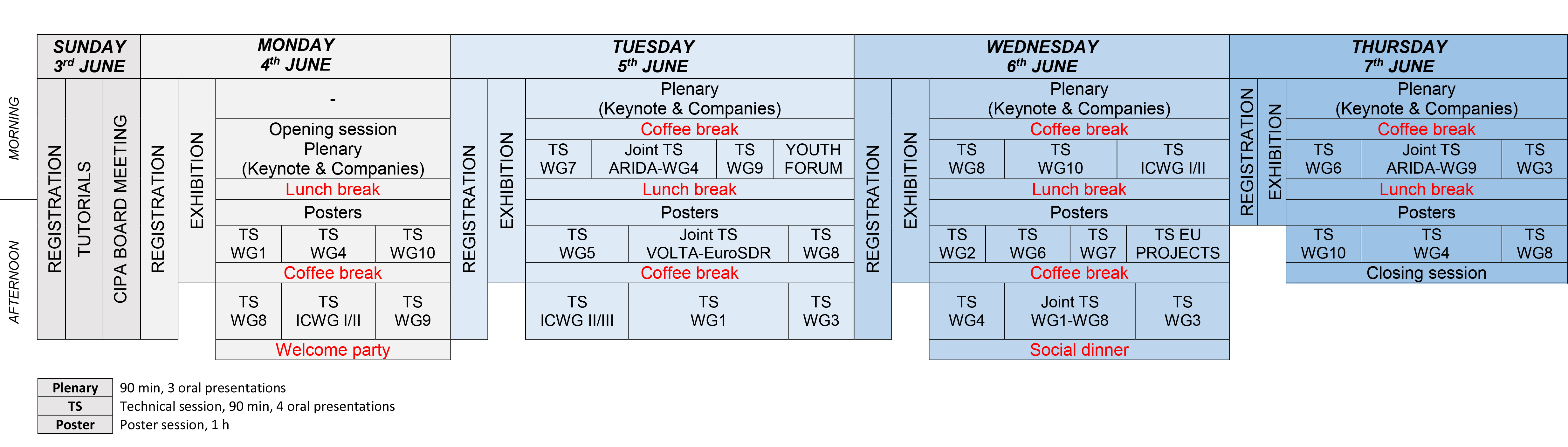
We are looking forward to welcome researchers, practioners and companies in the field of photogrammetry, computer vision, image processing and similar to present and discuss their results and activities. The Symposium will feature 4 days with plenary and parallel sessions, oral and poster presentations as well as keynote speakers from research and commercial domains and an exhibition of the most important business players in the photogrammetric and geospatial domain.
The event is organized in collaboration with SIFET (Italian Society of Photogrammetry and Topography), JSPRS (Japan Society of Photogrammetry and Remote Sensing) and ARIDA (Japanese Association for Real-time Imaging and Dynamic Analysis).
| Gold: | Silver: | Bronze: | Basic: | |
 |
 |
 |
||
 Fabio Remondino - FBK Trento, Italy Fabio Remondino - FBK Trento, Italy |
 Takashi Fuse - University of Tokyo, Japan Takashi Fuse - University of Tokyo, Japan |
 Isabella Toschi - FBK Trento, Italy Isabella Toschi - FBK Trento, Italy |
 Annalisa Armani, Main Local Organizer - FBK Trento, Italy Annalisa Armani, Main Local Organizer - FBK Trento, Italy |
 Elisa Mariarosaria Farella - FBK Trento, Italy Elisa Mariarosaria Farella - FBK Trento, Italy |
 Eleonora Grilli - FBK Trento, Italy Eleonora Grilli - FBK Trento, Italy |
 Fabio Menna - FBK Trento, Italy Fabio Menna - FBK Trento, Italy |
 Daniele Morabito - FBK Trento, Italy Daniele Morabito - FBK Trento, Italy |
 Michele Welponer - FBK Trento, Italy Michele Welponer - FBK Trento, Italy |
 Maria Allocca - FBK Trento, Italy Maria Allocca - FBK Trento, Italy |
 Emre Özdemir - FBK Trento, Italy Emre Özdemir - FBK Trento, Italy |
 Costas Armenakis - York University, Canada Costas Armenakis - York University, Canada |
 Andrea Fusiello - University of Udine, Italy Andrea Fusiello - University of Udine, Italy |
 Ronny Haensch - TU Berlin, Germany Ronny Haensch - TU Berlin, Germany |
 Mozhdeh Shahbazi - University of Calgary, Canada Mozhdeh Shahbazi - University of Calgary, Canada |
 Norbert Haala - University of Stuttgart, Germany Norbert Haala - University of Stuttgart, Germany |
 Mathias Rothermel - ETH Zurich, Switzerland Mathias Rothermel - ETH Zurich, Switzerland |
 Pablo d'Angelo - DLR, Germany Pablo d'Angelo - DLR, Germany |
 Jan Boehm - UCL, UK Jan Boehm - UCL, UK |
 Bisheng Yang - Wuhan University, China Bisheng Yang - Wuhan University, China |
 Mathieu Bredif, IGN, France Mathieu Bredif, IGN, France |
 Filiberto Chiabrando - Politecnico di Torino, Italy Filiberto Chiabrando - Politecnico di Torino, Italy |
 Franz Rottensteiner - Leibniz Universität Hannover, Germany Franz Rottensteiner - Leibniz Universität Hannover, Germany |
 Bruno Vallet - IGN, France Bruno Vallet - IGN, France |
 Markus Gerke - TU Braunschweig, Germany Markus Gerke - TU Braunschweig, Germany |
 Martin Weinmann - Karlsruhe Institute of Technology, germany Martin Weinmann - Karlsruhe Institute of Technology, germany |
 Alper Yilmaz - Ohio State University, USA Alper Yilmaz - Ohio State University, USA |
 Michael Ying Yang - ITC / Twente University, Michael Ying Yang - ITC / Twente University, The Netherlands |
 Yury Vizilter - GosNIIAS, Russia Yury Vizilter - GosNIIAS, Russia |
 Siavash Hosseinyalamdary - ITC / Twente University, Siavash Hosseinyalamdary - ITC / Twente University, The Netherlands |
 Jan Dirk Wegner - ETH Zurich, Switzerland Jan Dirk Wegner - ETH Zurich, Switzerland |
 Ribana Roscher - University of Bonn, Germany Ribana Roscher - University of Bonn, Germany |
 Michele Volpi - University of Zurich, Switzerland Michele Volpi - University of Zurich, Switzerland |
 Clement Mallet - IGN France Clement Mallet - IGN France |
 Stephen Kyle - UCL, UK Stephen Kyle - UCL, UK |
 Stuart Robson - UCL, UK Stuart Robson - UCL, UK |
 Thomas Luhmann - Jade University of Applied Sciences, Germany Thomas Luhmann - Jade University of Applied Sciences, Germany |
 Erica Nocerino - Aix-Marseille Université, France Erica Nocerino - Aix-Marseille Université, France |
 Fulvio Rinaudo - Politecnico di Torino, Italy Fulvio Rinaudo - Politecnico di Torino, Italy |
 Diego Gonzalez-Aguilera - University of Salamanca, Spain Diego Gonzalez-Aguilera - University of Salamanca, Spain |
 Geert Verhoeven - LBI, Austria Geert Verhoeven - LBI, Austria |
 Francesco Fassi - Politecnico di Milano, Italy Francesco Fassi - Politecnico di Milano, Italy |
 Mark Shortis - RMIT University, Australia Mark Shortis - RMIT University, Australia |
 Dimitrios Skarlatos - Cyprus University of Technology, Cyprus Dimitrios Skarlatos - Cyprus University of Technology, Cyprus |
 Panagiotis Agrafiotis - NTUA, Greece Panagiotis Agrafiotis - NTUA, Greece |
 Francesco Nex - ITC / Twente University, The Netherlands Francesco Nex - ITC / Twente University, The Netherlands |
 Martin Rutzinger - Austrian Academy of Science, Austria Martin Rutzinger - Austrian Academy of Science, Austria |
 Vladimir Knyaz - GosNIIAS, Russia Vladimir Knyaz - GosNIIAS, Russia |
 Belen Riveiro - University of Vigo, Spain Belen Riveiro - University of Vigo, Spain |
 Uwe Stilla - TU Munich, Germany Uwe Stilla - TU Munich, Germany |
 Michael Gruber - Vexcel Imaging, Austria Michael Gruber - Vexcel Imaging, Austria |
 Daniel Wujanz - TU Berlin, Germany Daniel Wujanz - TU Berlin, Germany |
| Dante Abate - The Cyprus Institute, Cyprus |
| Devrim Akca - Isik University, Turkey |
| Luigi Barazzetti - Politecnico di Milano, Italy |
| Alessandro Capra - University of Modena, Italy |
| Michael Cramer - University of Stuttgart, Germany |
| Livio De Luca - CNRS MAP, France |
| Clive Fraser - University of Melbourne, Australia |
| Andreas Georgopoulos - NTUA, Greece |
| Pierre Grussenmeyer - INSA, France |
| Boris Jutzi - Karlsruhe Institute of Technology (KIT), Germany |
| Thomas Kersten - HafenCity University Hamburg, Germany |
| Hans-Gerd Maas - TU Dresden, Germany |
| Mehdi Maboudi - TU Braunschweig, Germany |
| Jon Mills - Newcastle University, UK |
| Stephan Nebiker - University of Applied Sciences Northwestern Switzerland, Switzerland |
| Andreas Nuechter - Julius-Maximilians University Wurzburg, Germany |
| Sander Oude Elberink - Twente University, The Netherlands |
| Maria-Valasia Peppa - Newcastle University, UK |
| Heinz-Jürgen Przybilla - Bochum University of Applied Sciences, Germany |
| Riccardo Roncella - University of Parma, Italy |
| Konrad Schindler - ETH Zurich, Switzerland |
| Gunho Sohn - York University, Canada |
| Stratos Stylianidis - Aristotle University of Thessaloniki, Greece |
| Antonio Maria Garcia Tommaselli - Universidade Estedual Paulista, Brasil |
| Full Paper Submission (ISPRS Annals publication) | 12 January 2018 |
|---|---|
| Extended Abstract Submission (ISPRS Archives publication) | 26 January 2018 |
| Notification to Authors | 2 March 2018 |
| Full Paper Submission | 6 April 2018 |
| Tutorials | 3 June 2018 |
| Symposium | 4-7 June 2018 |
Abstracts
The abstract should be at least 1000 words, possibly with figures, and should be submitted as PDF file. No specific template is given.
Full papers
The full paper submitted for the reviewing process or as final paper must be formatted following the ISPRS format (download here the PDF or DOCX template), with a max length of 8 pages. After the authors affiliations and before the keywords please type Commission II/WGxx, where xx represent the Working Group (WG) where you are submitting your contribution.
The accepted articles will be published in the ISPRS Annals and International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences. The volume number will be XLII-2 for the Archives and IV-2 for the Annals. Each submitted paper needs at least one paid registration fee in order to be published.
 |
 |
| Jantien Stoter 3D Geoinformation group, Delft University of Technology, |
Davide Scaramuzza Robotics and Perception group, University of Zurich, Switzerland |
| “Towards a flawless 3D/4D city modelling information chain: where do 3D/4D data requirements and 3D/4D data collection possibilities meet?” | “Autonomous, agile, vision-controlled drones: from active to event vision” |
| Download the presentation in PDF | Download the presentation in PDF |
 |
 |
| Andre’ Streilein Swisstopo, Switzerland |
Camillo Ressl Department of Geodesy and Geoinformation, Photogrammetry group, Technical University Vienna, Austria |
| “National mapping agencies in age of digital transformation and the changing demands for research and development” | “Assessing the accuracy of dense image matching” |
| Download the presentation in PDF | Download the presentation in PDF |
Title: Camera calibration considerations for UAV photogrammetry
Presenter: Clive Fraser (Univ. of Melbourne, Australia)
Download the presentation in PDF
Title: Photogrammetry for industry 4.0 - prospects and challenges
Presenter: Thomas Luhmann (Jade University, Germany)
Download the presentation in PDF
Title: Point clouds and derivatives for nationwide geospatial information
Presenter: George Vosselman (Twente University, The Netherlands)
Download the presentation in PDF
Question: Big (Geo)data Expert: Jan Boehm (UCL, UK) |
Question: SLAM, SfM and photogrammetry - what's in a name? Expert: Clive Fraser (University of Melbourne, Australia) |
Question: Automatic image orientation - is everything solved? Expert: Andrea Fusiello (University of Udine, Italy) |
Question: Point cloud generation - where is reserach going? Expert: Norbert Haala (University of Stuttgart, Germany) |
Question: Where do you see photogrammetry in 2020++? Expert: Christian Heipke (Leibniz Universität Hannover, Germany) |
Question: Photogrammetry in industry - where do you stand? Expert: Thomas Luhmann (Jade University of Applied Sciences, Germany) |
Question: Underwater photogrammetry - where do we stand? Expert: Fabio Menna (FBK, Italy) |
Question: Real-time photogrammetry with UAvs and robots - where do we stand? Expert: Francesco Nex (Twente University, The Netherlands) |
Question: Aerial and satellite photogrammetry - how much are getting closer? Expert: Daniela Poli (AVT/Terra-Messflug, Austria) |
Question: Photogrammetry in CH - is it only SfM software? Expert: Fulvio Rinaudo (Politecnico di Torino, Italy) |
Question: Classification and semantic segmentation of point clouds - what is missing? Expert: Franz Rottensteiner (Leibniz Universität Hannover, Germany) |
Question: 3D mapping and monitoring of geohazards - where do we stand? Expert: Martin Rutzinger (Austrian Academy of Science, Austria) |
Question: How photogrammetry and LiDAR are helping driverless cars? Expert: Charles Toth (The Ohio State University, USA) |
Question: What are the most challenging research issues in the geospatial community? Expert: George Vosselman (Twente University, The Netherlands) |
Question: Machine learning in photogrammetry - where are we going? Expert: Jan Dirk Wegner (ETH Zurich, Switzerland) |
Question: Image sequence analysis and videogrammetry in 2020 - where are we going? Expert: Alper Yilmaz (The Ohio State University, USA) |
There are four tutorials offered and they will take place on Sunday, 3 June 2018.
| Fee | One day tutorial | 100 euros | before May 11th, 2018 |
|---|---|---|---|
| Half-day tutorial | 50 euros | One day tutorial | 125 euros | On-site (Limited availability of seats) |
| Half-day tutorial | 75 euros |
TOPIC 1
Title: Calibration techniques and accuracy considerations for single and multi-camera systems
Presenters: Prof. Mark R. Shortis (RMIT University, Australia), Prof. Thomas Luhmann (Jade University, Germany), Prof. Stuart Robson (University College London, UK)
Description: Calibration and camera considerations, parameter sets and photo- versus block-invariance, targeting issues, 2D versus 3D calibration objects, free networks and outlier detection, external constraints, multi-camera v single camera, EO and RO constraints, eccentricity corrections, VDE/VDI analysis, environmental factors and refraction, example applications in optical metrology, overview/demonstration of Vision Metrology System (VMS) as a research tool.
Target audience: PhD students, researchers and practitioners
Level: intermediate
Duration: half-day (2:00 pm - 6:00 pm, 3 June 2018)



TOPIC 2 (Sold out!)
Title: Deep learning for geospatial data analysis
Presenters: Jan Dirk Wegner & Nico Lang (Photogrammetry & Remote Sensing, ETH Zurich, Switzerland)
Description: Modern (deep) machine learning techniques are at the core of many successful approaches in computer vision, image interpretation, 3D object reconstruction and beyond. Instead of hierarchical, rule-based methods that are tailored for a particular scene layout and task, machine learning enables to model relevant object patterns directly from labeled training data. In contrast to many established classification pipelines that work with a limited set of handcrafted features, the power of deep learning stems from end-to-end learning. The machine learns appropriate features directly for a given data set and task. The tutorial will explain the theory of deep learning, present an overview of recent research, and teach a hands-on programming class for deep learning beginners. Emphasis is on deep learning techniques applied to geospatial data like aerial images and point clouds and tasks like semantic segmentation and object detection.
Target audience: PhD students, researchers and practitioners
Level: Beginner to intermediate
Duration: half-day (9:00 am - 1:00 pm, 3 June 2018)

TOPIC 3
Title: Acquisition and Automatic Characterization of Scenes – A holistic approach for scene analysis in terms of semantic labeling and object extraction
Presenters: Martin Weinmann (Karlsruhe Institute of Technology, Germany), Michael Weinmann (University of Bonn, Germany), Franz Rottensteiner (Leibniz University Hannover, Germany), Boris Jutzi (Karlsruhe Institute of Technology, Germany)
Description: The adequate acquisition and analysis of a scene are of great interest for photogrammetry, remote sensing, computer vision and robotics. In the scope of this tutorial, we will address four major issues in this regard. The first part of the tutorial will give a general introduction on geometry acquisition via (passive and active) optical 3D sensing techniques. The second part of the tutorial will focus on active optical 3D sensing as commonly used for the acquisition of large geospatial data and provide a survey on the extraction of descriptive features from such data. The third part of the tutorial will focus on a semantic interpretation of point cloud data and thereby address all components of a typical processing workflow from given point cloud data to a semantic labeling with respect to user-defined classes. The fourth part of the tutorial is dedicated to deep learning techniques for the semantic labeling of point clouds as well as to the context-based classification of these data using graphical models such as Conditional Random Fields (CRFs).
Target audience: PhD students, researchers and practitioners
Level: Beginner to intermediate
Duration: full-day (9:00 am - 6:00 pm, 3 June 2018)
TOPIC 4
Title: Global Network Orientation by Synchronization
Presenters: Andrea Fusiello, Federica Arrigoni (University of Udine, Italy)
Description: A crucial issue in Photogrammetry and Computer Vision is image network orientation, i.e., estimating camera attitudes and positions for a set of images. Whereas the problem can be considered solved for small-scales instances, dealing with a large number of images calls for efficiency and scalability, which are addresses by synchronization. The goal of synchronization (of direct isometries) is to recover the absolute orientation of a number of 3D reference frames, starting from a redundant set of relative orientations. This problem finds application in structure from motion, SLAM, registration of 3D point sets and sensor network localization. Synchronization methods work in frame-space (as opposed to point-space, like bundle adjustment) and are global, for they consider simultaneously all the relative information. For these reasons, they have gained increasing attention especially in the Computer Vision and Automatic Control communities. This tutorial will provide a comprehensive introduction to synchronization and describe some solution methods, focusing on closed-form matrix formulations.
Target audience: PhD students, researchers and practitioners
Level: Intermediate to advanced
Duration: half-day (2:00 pm - 6:00 pm, 3 June 2018)
| Early Bird | Regular participant | 475 euros | Until March 31st, 2018 |
|---|---|---|---|
| B.Sc and M.Sc student | 200 euros | ||
| PhD student | 300 euros | ||
| Senior | 350 euros | ||
| Accompanying (for welcome party and social dinner) | 75 euros | ||
| Regular | Regular participant | 525 euros | From April 1st until May 27th, 2018 |
| B.Sc and M.Sc student | 225 euros | ||
| PhD student | 325 euros | ||
| Senior | 400 euros | ||
| Accompanying (for welcome party and social dinner) | 75 euros | ||
| On-site | Regular participant | 575 euros | From June 3rd until June 7th, 2018 |
| B.Sc and M.Sc student | 250 euros | ||
| PhD student | 350 euros | ||
| Senior | 450 euros | ||
| Accompanying (for welcome party and social dinner) | 100 euros |
| Two-days registration | 350 euros | ||
|---|---|---|---|
| One-day registration | 250 euros |
Registration fees cover session attendance (4-7 June), conference bag, welcome party, coffee breaks, lunches and social dinner. Fees for tutorials attendance (3 June) are not included and should be payed separately.
B.Sc and M.Sc students are considered undergraduated university students or just graduated (3 months) and should provide a valid evidence of their student status (to be sent by email to isprs-tc2@fbk.eu with a copy of the paid registration).
PhD students should be max 30 years old and should provide a valid evidence of their student status (to be sent by email to isprs-tc2@fbk.eu with a copy of the paid registration).
Senior are considered participants over 65 years old.
Visa Support Letter
To request a Visa Support Letter, please follow the instructions available here.
Invitation letters to participate in the event will be issued ONLY to participants who have already paid the registration fee. No Invitation letters can be issued for accompanying persons.
Travel Grants
The ISPRS Foundation provides travel grants to enable young authors, distinguished speakers, and officially designated Delegates, especially from developing countries, to participate in ISPRS sponsored events and in forums promoting international cooperation, advancements and benefits of the P&RS&SI sciences.
Click here to complete your travel grant application online.
Deadline for applications is March 19th, 2018. Successful applicants will be notified by March 31st.
General Data Protection
Photographs and/or video will be taken during the event for archival purposes and social media.
If you do not wish to be photographed, please inform an event organiser at the registration desk.
The registration portal through the ConfTool system is now CLOSED. Registrations are possible on site, and can be paid by credit card (no cash payment is permitted). |
The poster presentations are allocated every day after the lunch break, details will be available soon in the preliminary technical programme. Posters should be in A0 format. We are not printing posters for authors, you can find printing shops in Riva if necessary.
Congress Centre, Riva del Garda, Italy
The ISPRS Technical Commission II Symposium will be held in Riva del Garda, the main town in the Northern Garda Lake. The mild climate favors a typically Mediterranean vegetation with lemon trees, olive trees, laurels and palm trees: a true Mediterranean island at the foot of the Dolomites. The center of Riva del Garda will fascinate you with its works of art and architecture, witnessing to ancient history and a past rich in art and culture. In past, the town hosted famous names such as Nietzsche, Kafka and the Mann brothers. This exclusive yet familiar reception is still part of the tradition of the shores of Garda Lake.
The Technical Commission II Symposium will be held in the Riva del Garda Congress Center (Parco Lido / via Filzi) which is located by the lake and few minutes from the center of the town.




The most convenient airport is Verona (less than 1h from Riva del Garda), which is very well connected to Munich and Frankfurt, as well as Paris and London. You may also consider Milan (Malpensa or Linate) and Bergamo.
If you flight to Verona, you can take the Aerobus or bus services to get to the Verona train station.
If you travel by train, check the Italian railways website to get to Rovereto, which is the closest train station to Riva del Garda.
From Rovereto train station, you can get to Riva del Garda by bus.
If you travel by car, take the A22 (Modena-Brennero) motorway and get off at Rovereto Sud - Lago di Garda Nord exit.
As official in-house travel agency of the Congress Center, RIVATOUR offers a wide selection of accommodation options and transfer services from/to the airports, in various price ranges. Please, remember that the on-line booking of the airports shuttle service is available at discounted price only if the booking will be made together with the hotel.
BOOK HERE YOUR HOTEL WITH DISCOUNTED TRANSFER SERVICE |
Fabio Remondino - remondino@fbk.eu -
Isabella Toschi - toschi@fbk.eu -
3D Optical Metrology unit - FBK Trento, Italy