ISPRS Congress 2026
Wei Zhang,
Vincent Ress,
David Skuddis,
Uwe Soergel,
Norbert Haala
Institute for Photogrammetry and Geoinformatics, University of Stuttgart
Paper
Dataset
Code
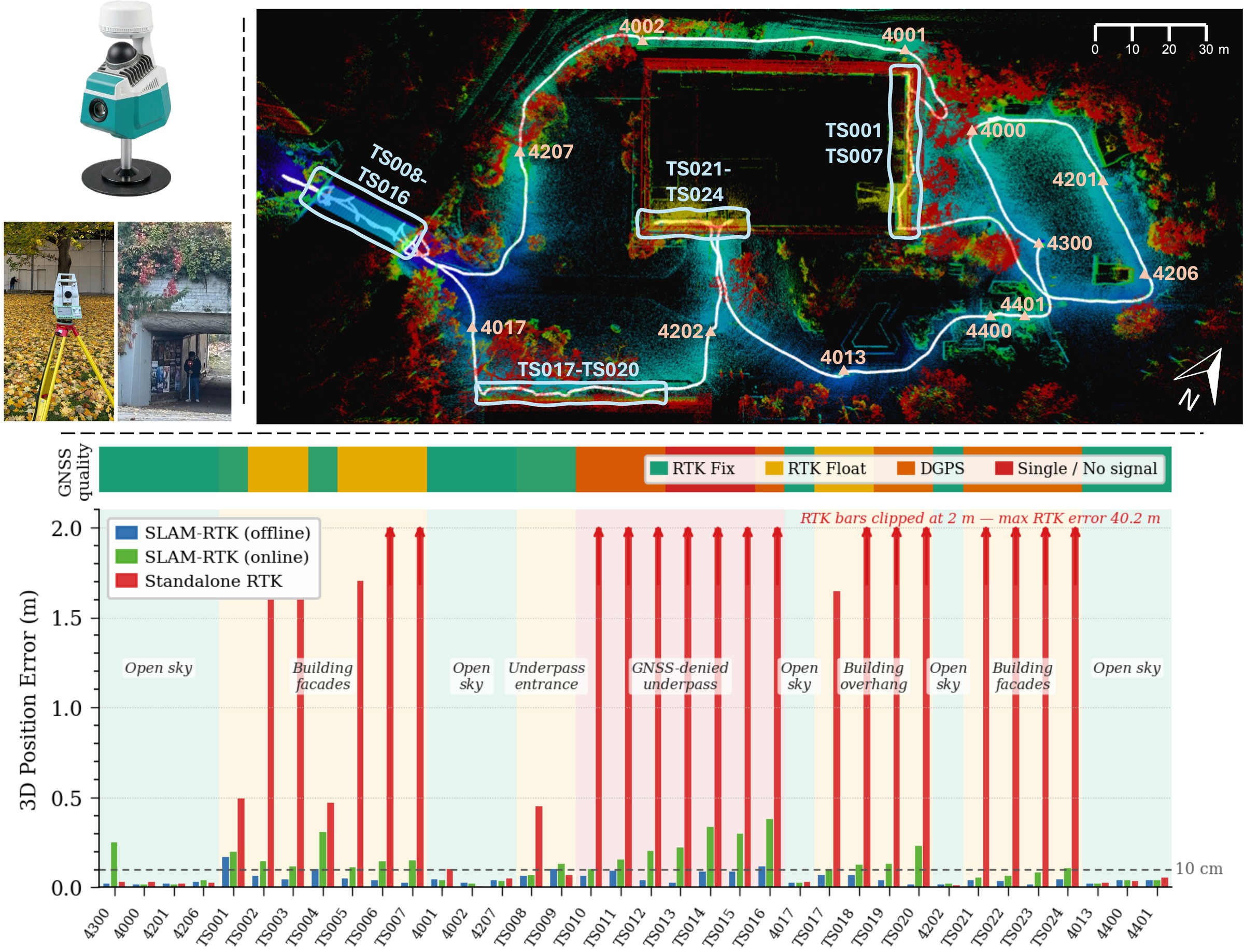
Top: Sensor setup (left) and checkpoints overlaid on the SLAM map of the Stadtgarten scene (right). Orange: open-sky; Cyan: GNSS-obstructed. Bottom: Absolute 3D error per checkpoint for
Stadtgarten Seq. 1 using FAST-LIO-SAM. Standalone RTK errors grow to tens of meters in GNSS-degraded
zones, while offline RTK-SLAM remains mostly below 10 cm.
Abstract
RTK-SLAM systems integrate simultaneous localization and
mapping (SLAM) with real-time kinematic (RTK) GNSS positioning,
promising both relative consistency and globally referenced coordinates
for efficient georeferenced surveying. A critical and underappreciated
issue is that the standard evaluation metric, Absolute Trajectory Error
(ATE), first fits an optimal rigid-body transformation between the
estimated trajectory and reference before computing errors. This
so-called SE(3) alignment absorbs global drift and systematic errors,
making trajectories appear more accurate than they are in practice, and
is unsuitable for evaluating the global accuracy of RTK-SLAM. We present
a geodetically referenced dataset and evaluation methodology that
expose this gap. A key design principle is that the RTK receiver is used
solely as a system input, while ground truth is established
independently via a geodetic total station — a separation absent from
all existing benchmarks. The dataset covers two outdoor-to-indoor scenes
with synchronized LiDAR, camera, IMU, and RTK inputs. We evaluate
LiDAR-inertial, visual-inertial, and LiDAR-visual-inertial RTK-SLAM
systems alongside standalone RTK, reporting direct global accuracy and
SE(3)-aligned relative accuracy to make the gap explicit. Results show
that SE(3) alignment can underestimate absolute positioning error by up
to 76%. RTK-SLAM achieves centimeter-level absolute accuracy in open-sky
conditions and maintains decimeter-level global accuracy indoors, where
standalone RTK degrades to tens of meters.
Dataset
Data Walkthrough
The videos below show recorded sensor data replayed at 4× speed with online FAST-LIO-SAM processing.
Top row: 3D local map view with accumulated point cloud and trajectory (left); IMU readings (right).
Bottom row: Global map view (left) — ★ stars: surveyed checkpoints, ● red points: GNSS measurements, ● blue trajectory: RTK-SLAM online estimate; GNSS status with RTK fix quality indicators (center); camera image (right).
Sensor Platform
The handheld RTK-SLAM device integrates:
- Livox MID360 LiDAR with integrated IMU — 360° horizontal, 59° vertical FOV, 10 Hz, non-repetitive scan pattern
- 2 MP global shutter camera — hardware-triggered at ~10 Hz
- UM980 GNSS receiver — RTK corrections provided by the German SAPOS service, centimeter-level accuracy under open-sky
The LiDAR and its built-in IMU are hardware-synchronized to GNSS time via a 1 PPS signal. All extrinsics are carefully calibrated; the GNSS antenna phase center and device base center are referenced via CAD model offsets, enabling direct comparison of
estimated positions against surveyed control points.
1 cm
Ground Truth Accuracy
Scenes
Stadtgarten
Public park in Stuttgart. Two sequences covering 1.04 km and 0.46 km. Three distinct
GNSS zones: open sky, partial obstruction (buildings/trees), and a fully GNSS-denied 30 m underpass tunnel. 55 control points total.
OutdoorGNSS-degradedGNSS-denied
Construction Hall
IntCDC construction site,
University of Stuttgart. Two sequences (clockwise &
counter-clockwise) covering 0.48 km and 0.39 km. Each sequence
begins and ends outdoors with RTK fix and traverses the interior where
GNSS signals are severely degraded (>400 s, ~150 m). 32
control points total.
Outdoor-to-indoorGNSS-severely degraded
Geodetic Ground Truth
Ground truth is established via a two-stage procedure entirely independent of the RTK receiver used as system input. First, open-sky anchor points are surveyed by static GNSS observations (<5 mm std).
A Leica TS16 total station is oriented to these anchors and measures all remaining control points, including those under GNSS obstruction and inside GNSS-denied areas, propagating the global
reference frame via a traverse. The final ground truth accuracy is better than 1 cm for all control points.
Critical design principle: the RTK receiver is exclusively a system input.
Ground truth is established by the total station independently. This separation — absent from all existing benchmarks — is what enables meaningful evaluation of absolute global accuracy.
Evaluation
Key Insight
The standard SE(3)-aligned ATE is unsuitable for evaluating RTK-SLAM. A trajectory that is meters away from its true global position can still yield a near-zero SE(3)-aligned ATE if its internal geometry is consistent. Our evaluation protocol directly compares estimated
positions against geodetically surveyed control points — without any alignment — exposing global drift that standard benchmarks would hide. The alignment gap can reach 76%, meaning standard metrics can underestimate the true absolute error by up to a factor of 4.
Methods
We benchmark three RTK-SLAM configurations:
- FAST-LIO-SAM — LiDAR-inertial-GNSS system combining FAST-LIO2 front-end with factor graph backend. Both online and offline (batch pose graph optimization) results reported.
- OKVIS2-X(vig) — Keyframe-based visual-inertial-GNSS system with tight GNSS integration via 4-DoF frame alignment.
- OKVIS2-X(lvig) — Same system extended with LiDAR (LiDAR-visual-inertial-GNSS). Compared against the vig configuration to quantify LiDAR's contribution.
- Standalone RTK — Direct RTK positioning without any odometry integration.
Quantitative Results
Absolute ATE (no alignment) vs. SE(3)-aligned ATE. The Gap column shows how much the alignment hides. A gap of 76% means the standard metric underestimates the true absolute error by a factor of more than 4.
| Scene |
Seq. |
FAST-LIO-SAM |
OKVIS2-X(vig) |
OKVIS2-X(lvig) |
RTK
[m] |
| Online [m] | Offline [m] | SE3 [m] | Gap [%] |
Online [m] | Offline [m] | SE3 [m] | Gap [%] |
Online [m] | Offline [m] | SE3 [m] | Gap [%] |
| Stadtgarten | Seq. 1 |
0.162 | 0.068 | 0.065 | 4 |
3.276 | 0.189 | 0.185 | 2 |
4.103 | 0.068 | 0.060 | 12 |
13.98 |
| Stadtgarten | Seq. 2 |
0.150 | 0.099 | 0.077 | 22 |
2.695 | 0.907 | 0.831 | 8 |
3.180 | 0.092 | 0.080 | 13 |
11.99 |
| Constr. Hall | Seq. 1 |
0.256 | 0.248 | 0.220 | 11 |
1.437 | 0.788 | 0.579 | 27 |
0.761 | 0.321 | 0.227 | 29 |
12.01 |
| Constr. Hall | Seq. 2 |
0.439 | 0.373 | 0.089 | 76 |
3.715 | 0.700 | 0.511 | 27 |
0.825 | 0.170 | 0.081 | 52 |
14.84 |
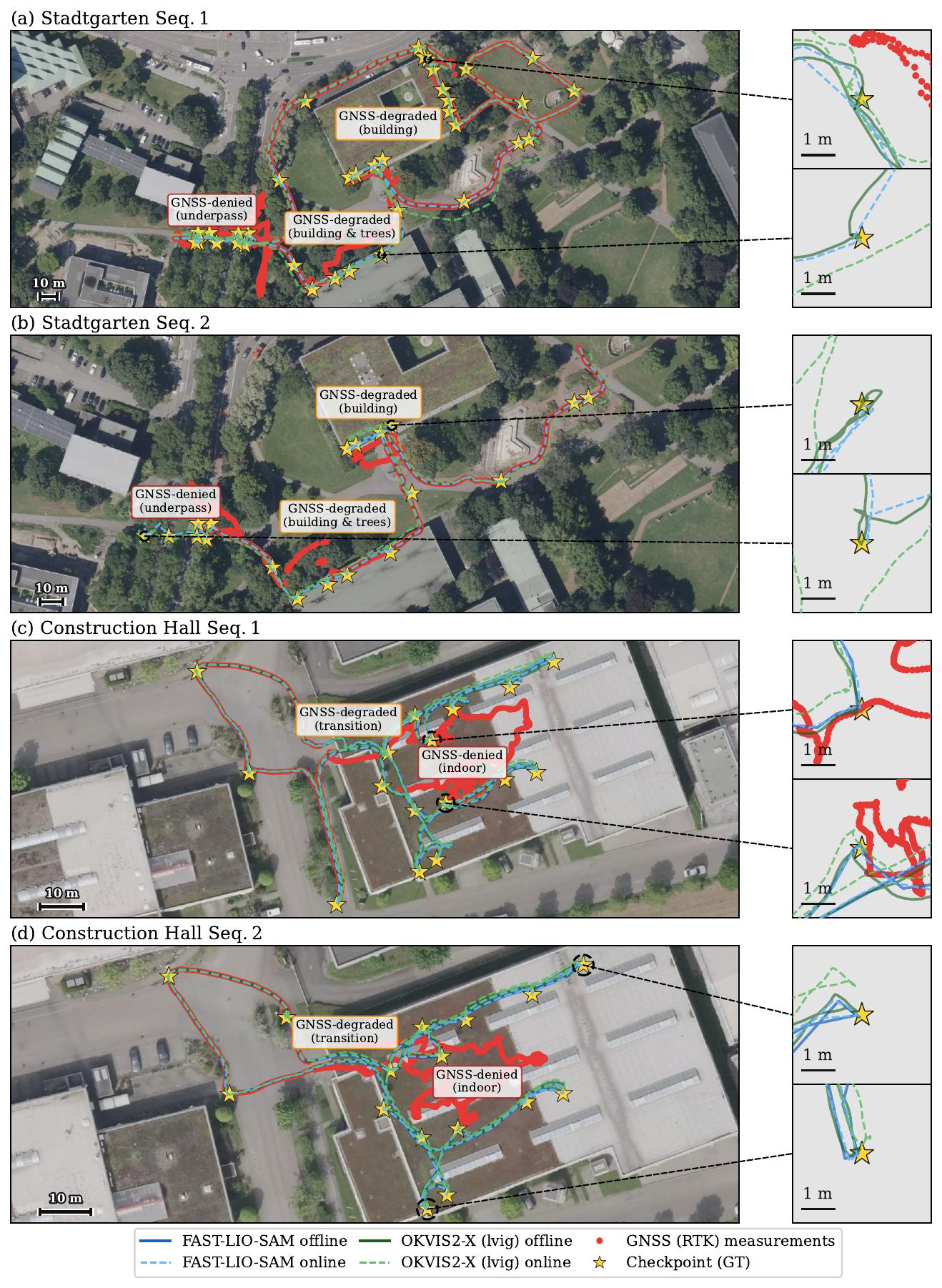
Trajectory Comparisons
Trajectories for all four sequences overlaid on satellite imagery, with GNSS-denied and GNSS-degraded zones annotated.
Drift Under GNSS Outage
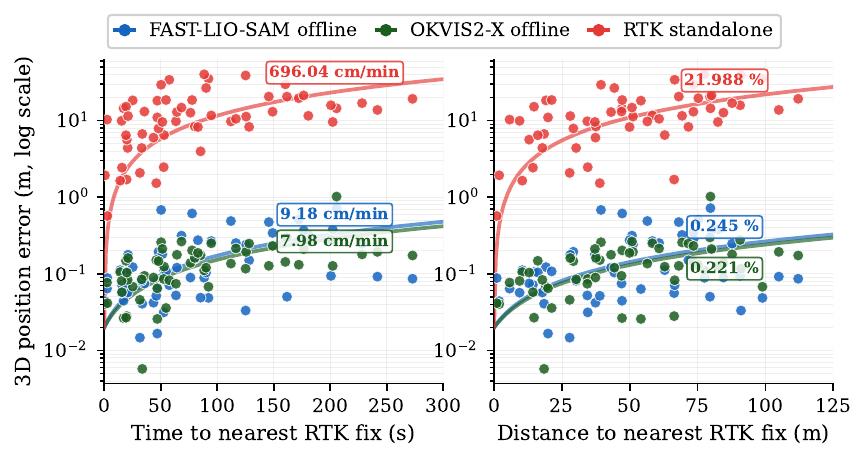
Positioning error (log scale) as a function of time elapsed
and distance traveled to the nearest RTK fix, aggregated over all
checkpoint measurements. Because offline optimization propagates
corrections both forward and backward, the x-axis is distance to the
nearest RTK fix rather than only since the last fix. LiDAR-aided methods
show low drift rates:
9.2 cm/min (0.25% of path) for FAST-LIO-SAM and 8.0 cm/min (0.22%) for OKVIS2-X(lvig).
Standalone RTK degrades rapidly once signal quality deteriorates.
Download
The dataset, calibration files, and evaluation scripts are publicly available.
Each sequence contains synchronized LiDAR, camera, IMU, and RTK data.
All sequences are available in three formats: ROS1 (.bag), ROS2 (.db3), and EuRoC (extended format compatible with OKVIS2-X).
Note on camera timestamps: The camera has a
hardware trigger delay of −20.6 ms relative to the IMU clock
(estimated by Kalibr). This offset is already compensated in all
released formats and no additional time shift is needed.
| Sequence | Duration | Length | RTK Fix | Ctrl. Pts | Download |
|---|
| Stadtgarten Seq. 1 |
26 min 42 s |
1.04 km |
54% |
36 |
ROS1
ROS2
EuRoC
|
| Stadtgarten Seq. 2 |
14 min 36 s |
0.46 km |
40% |
19 |
ROS1
ROS2
EuRoC
|
| Constr. Hall Seq. 1 |
12 min 21 s |
0.48 km |
25% |
16 |
ROS1
ROS2
EuRoC
|
| Constr. Hall Seq. 2 |
9 min 59 s |
0.39 km |
23% |
16 |
ROS1
ROS2
EuRoC
|
All Formats (HuggingFace)
Evaluation Code
How to cite
@article{zhang2026rtkslam,
title={An RTK-SLAM Dataset for Absolute Accuracy Evaluation in GNSS-Degraded Environments},
author={Zhang, Wei and Ress, Vincent and Skuddis, David and Soergel, Uwe and Haala, Norbert},
journal={The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences},
year={2026}
}