Accurate visual localization in dense urban environments constitutes a fundamental task in photogrammetry, geospatial information science, and robotics. While imagery is a low-cost and widely accessible sensing modality, its effectiveness on visual odometry is often limited by textureless surfaces, severe viewpoint changes, and long-term drift. The growing public availability of airborne laser scanning (ALS) data opens new avenues for scalable and precise visual localization by leveraging ALS as a prior map.
The benchmark offers:
- A new large-scale dataset that combines ground-level imagery from mobile mapping systems with ALS point clouds.
- Accurate 6-DoF ground-truth image poses achieved by registering mobile LiDAR submaps to ALS data using ground segmentation and façade reconstruction, followed by multi-sensor pose graph optimization.
- A unified benchmarking suite for both global and fine-grained I2P localization.
Data Access
The point cloud data, images, ground truth poses, and tools are here:
https://drive.google.com/drive/folders/1iDc9rFmDA_FBUS-nj9ep-1pLyWfh0lp5?usp=sharing
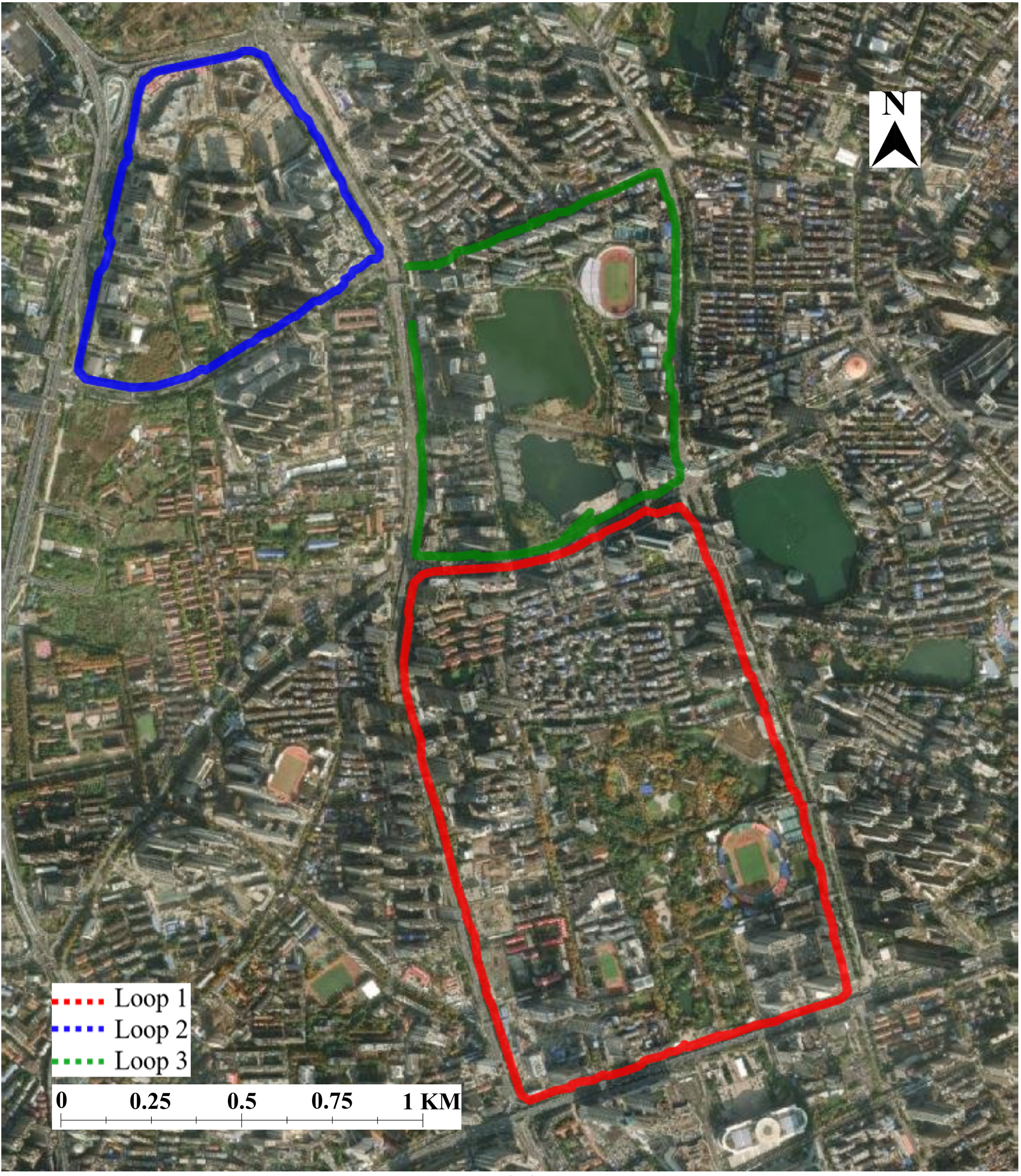
Figure 1. Overview of the trajectories.
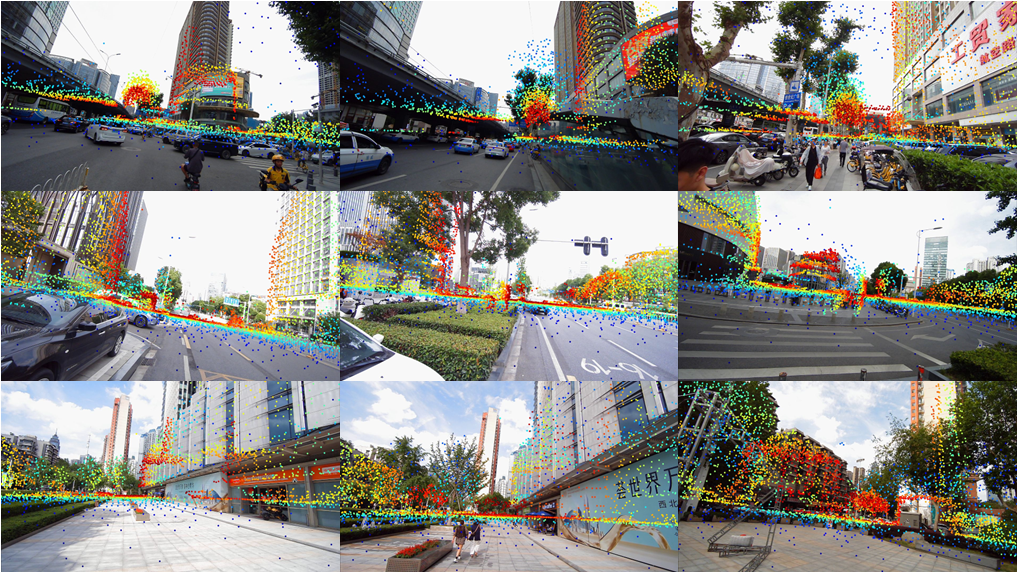
Figure 2. Projection of ALS point clouds to images.
Table 1. Number of image-ALS point cloud pairs
Dataset |
Pairs |
Wuhan Loop 1 |
8526 |
Wuhan Loop 2 |
5206 |
Wuhan Loop 3 |
5663 |
Citation
If you use this benchmark in your research, please cite the following paper:
@article{yang2026agi2p,
title={AGI2P: Benchmarking Aerial--Ground Image-to-Point cloud localization with a large-scale dataset},
author={Yang, Yandi and Li, Jianping and Liao, Youqi and Li, Yuhao and Niu, Ruizhe and Zhang, Yizhe and Dong, Zhen and Yang, Bisheng and El-Sheimy, Naser},
journal={ISPRS Journal of Photogrammetry and Remote Sensing},
volume={236},
pages={22--36},
year={2026},
publisher={Elsevier}
}