Registering large-scale point clouds is fundamental for applications ranging from 3D modeling and robotics to forestry and heritage conservation. Yet, existing datasets often face key issues: they either lack the scale and environmental diversity needed for real-world scenarios, or they do not provide sufficient variations in overlap, point density, and clutter. WHU-TLS overcomes these limitations by providing a massive, highly diverse collection of Terrestrial Laser Scanning (TLS) point clouds across varied environments, paired with reliable ground-truth transformations for precise algorithm evaluation.
The benchmark offers:
- A large-scale dataset comprising 115 scans and over 1740 million 3D points.
- Data collected across 11 diverse environments (indoor/outdoor, structured/unstructured).
- Ground-truth transformations and complete registration graphs for all scan pairs.
- Challenging scenarios with varying point densities, clutter, occlusions, and varying degrees of overlap. These environments include: Subway station, High-speed railway platform, Mountain, Forest, Park, Campus, Residence, Riverbank, Heritage building, Underground excavation and Tunnel.
Data Access
The point cloud data, ground truth, and related evaluation tools are hosted publicly here (https://forms.gle/D7N529BQJ2ZbJMzr7). You can access the dataset and further instructions on our official GitHub repository: https://github.com/WHU-USI3DV/WHU-TLS.
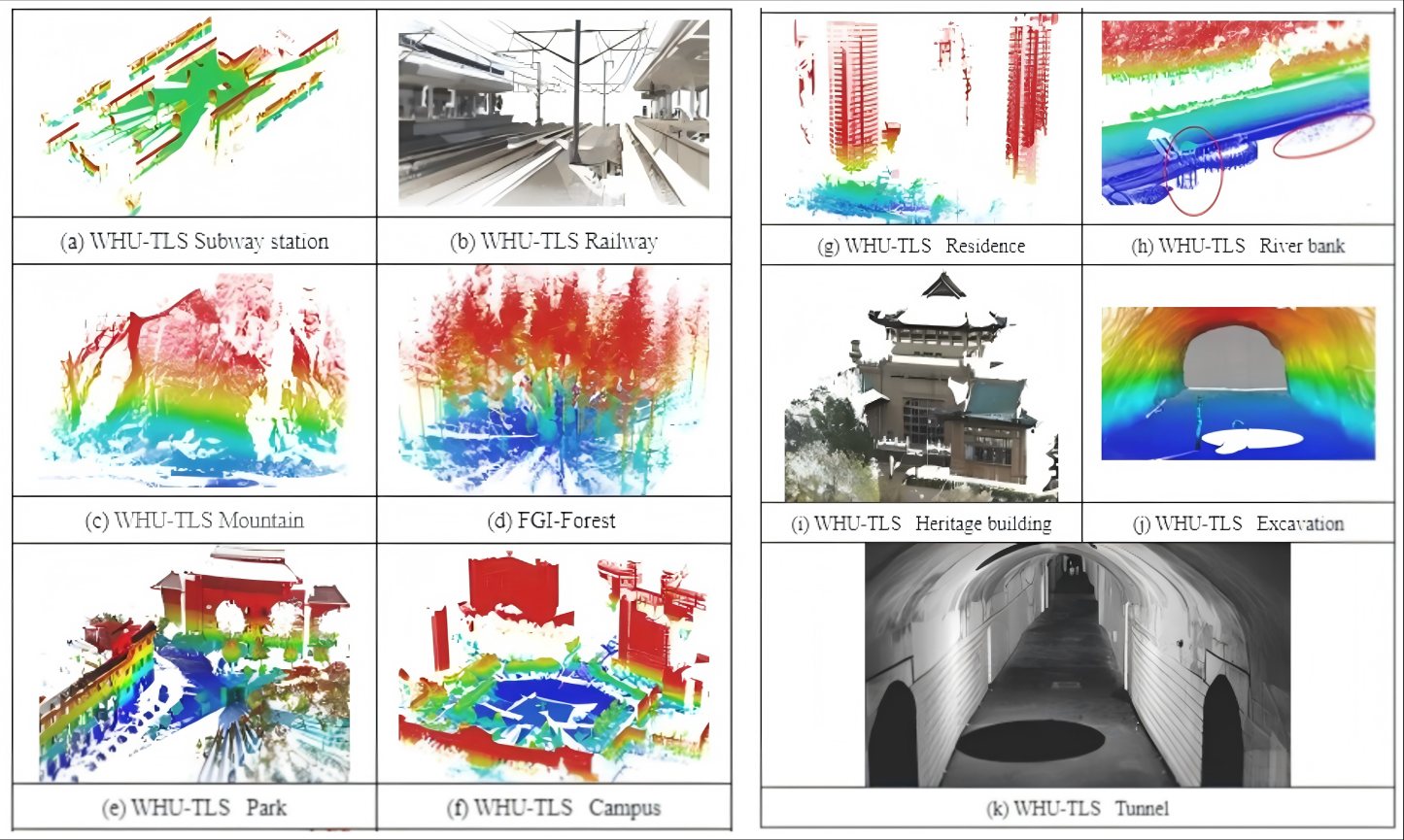
Figure 1. Overview of the 11 diverse environments.
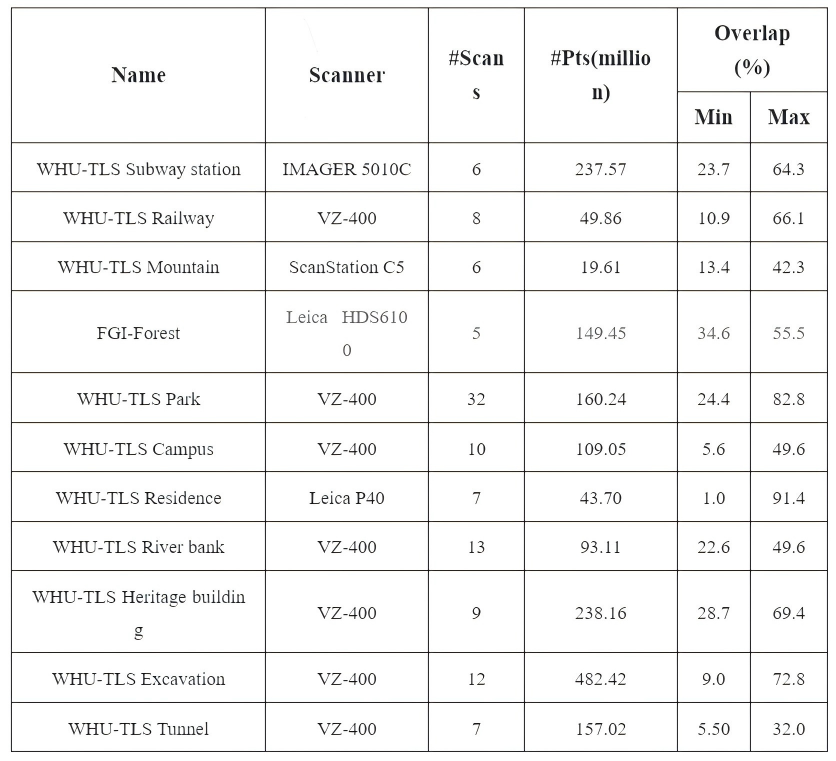
Figure 2. Details of the WHU-TLS benchmark data set.
Citation
@article{dong2020registration,
title={Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark},
author={Dong, Zhen and Liang, Fuxun and Yang, Bisheng and Xu, Yusheng and Zang, Yufu and Li, Jianping and Wang, Yuan and Dai, Wenxia and Fan, Hongchao and Hyypp{\"a}, Juha and others},
journal={ISPRS Journal of Photogrammetry and Remote Sensing},
volume={163},
pages={327--342},
year={2020},
publisher={Elsevier}
}
DOI: https://doi.org/10.1016/j.isprsjprs.2020.03.013